/*! elementor – v3.15.0 – 20-08-2023 */
.elementor-heading-title{padding:0;margin:0;line-height:1}.elementor-widget-heading .elementor-heading-title[class*=elementor-size-]>a{color:inherit;font-size:inherit;line-height:inherit}.elementor-widget-heading .elementor-heading-title.elementor-size-small{font-size:15px}.elementor-widget-heading .elementor-heading-title.elementor-size-medium{font-size:19px}.elementor-widget-heading .elementor-heading-title.elementor-size-large{font-size:29px}.elementor-widget-heading .elementor-heading-title.elementor-size-xl{font-size:39px}.elementor-widget-heading .elementor-heading-title.elementor-size-xxl{font-size:59px}
Unmanned Surface Vehicle Fish Feeder 2.0
The New USV Fish Feeder, Second Generation!
The Beauty of Unmanned Surface Vehicle Fish Feeder
https://youtu.be/42u5h5iz2KU
/*! elementor – v3.15.0 – 20-08-2023 */
.elementor-widget-image{text-align:center}.elementor-widget-image a{display:inline-block}.elementor-widget-image a img[src$=”.svg”]{width:48px}.elementor-widget-image img{vertical-align:middle;display:inline-block} 
What is USV Fish Feeder?
USV (Unmanned Surface Vehicle) Fish Feeder is a water-based robot designed to feed fish automatically. The USV fish feeder has the advantage of being able to reduce production costs and the time required in manual feeding. The USV Fish Feeder can cover a large area of pond to feed evenly.
What’s new in this second generation?
This second generation has significant updates, including:
- Larger dimensions, with more weight to carry.
- Has a feed ejection system, can eject as far as 3 meters.
- Has an auotonomous system with fuzzy logic control that can move according to the desired point and then throw feed at each predetermined point.
- Can also be operated using a remote control as far as 5km.
- The location of the USV can be monitored via the USV App android application.
Specifications
Dimension:
(Length x Width x Height)
150cm x 67cm x 29cm
Max. Feed Load: 20kg
Max. Hull Load: 50kg
Feed ejector up to 3 meters away
Maximum maneuvering speed 3m/s
/*! elementor – v3.15.0 – 20-08-2023 */
.elementor-widget-image-carousel .swiper,.elementor-widget-image-carousel .swiper-container{position:static}.elementor-widget-image-carousel .swiper-container .swiper-slide figure,.elementor-widget-image-carousel .swiper .swiper-slide figure{line-height:inherit}.elementor-widget-image-carousel .swiper-slide{text-align:center}.elementor-image-carousel-wrapper:not(.swiper-container-initialized):not(.swiper-initialized) .swiper-slide{max-width:calc(100% / var(–e-image-carousel-slides-to-show, 3))}


Communication Range:
5km (Remote Control)
Battery:
Litihium-Ion 21700
Battery Life:
up to 3 hours
Max Speed:
13500 RPM
USV location can be monitored
Documentation
The New USV Fish Feeder, Second Generation!
Design System

How does it work?
This system is designed to make an automatic fish feed system. This automatic feed system is on an Unmanned Surface Vehicle (USV) that can move to a certain point according to the command. This automatic feed system will sprinkle feed when the USV has reached the specified point. There is one fish feed tank to hold feed with a volume of twenty kilograms and a small bucket with a load cell sensor to measure the weight of fish feed before it is spread on the pond so that the feed sown at each point matches the needs of the fish. Then catapulted using a DC motor with an adjustable rotational speed can catapult as far as 3 meters.
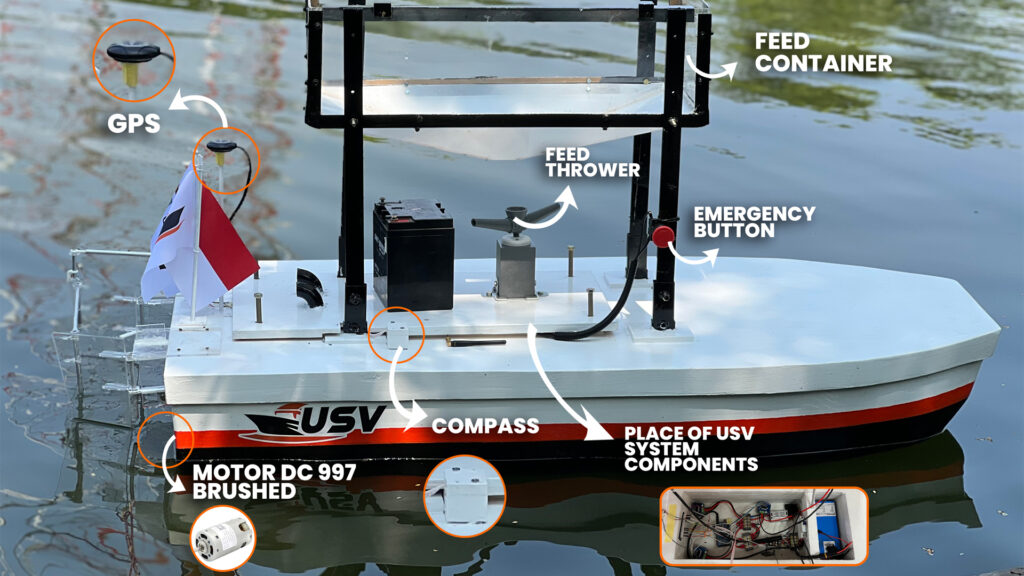
General components used
- GPS Module
- Compass
- Microcontroller
- Voltage Stepdown
- LoRa (for location monitoring)
- DC Brushed Motor
- Motor Driver
- MCB and Emergency Button


The Originator of the New USV Fish Feeder, Second Generation

Muhammad Kevin Al Ghozali
/*! elementor – v3.15.0 – 20-08-2023 */
.elementor-widget-divider{–divider-border-style:none;–divider-border-width:1px;–divider-color:#0c0d0e;–divider-icon-size:20px;–divider-element-spacing:10px;–divider-pattern-height:24px;–divider-pattern-size:20px;–divider-pattern-url:none;–divider-pattern-repeat:repeat-x}.elementor-widget-divider .elementor-divider{display:flex}.elementor-widget-divider .elementor-divider__text{font-size:15px;line-height:1;max-width:95%}.elementor-widget-divider .elementor-divider__element{margin:0 var(–divider-element-spacing);flex-shrink:0}.elementor-widget-divider .elementor-icon{font-size:var(–divider-icon-size)}.elementor-widget-divider .elementor-divider-separator{display:flex;margin:0;direction:ltr}.elementor-widget-divider–view-line_icon .elementor-divider-separator,.elementor-widget-divider–view-line_text .elementor-divider-separator{align-items:center}.elementor-widget-divider–view-line_icon .elementor-divider-separator:after,.elementor-widget-divider–view-line_icon .elementor-divider-separator:before,.elementor-widget-divider–view-line_text .elementor-divider-separator:after,.elementor-widget-divider–view-line_text .elementor-divider-separator:before{display:block;content:””;border-bottom:0;flex-grow:1;border-top:var(–divider-border-width) var(–divider-border-style) var(–divider-color)}.elementor-widget-divider–element-align-left .elementor-divider .elementor-divider-separator>.elementor-divider__svg:first-of-type{flex-grow:0;flex-shrink:100}.elementor-widget-divider–element-align-left .elementor-divider-separator:before{content:none}.elementor-widget-divider–element-align-left .elementor-divider__element{margin-left:0}.elementor-widget-divider–element-align-right .elementor-divider .elementor-divider-separator>.elementor-divider__svg:last-of-type{flex-grow:0;flex-shrink:100}.elementor-widget-divider–element-align-right .elementor-divider-separator:after{content:none}.elementor-widget-divider–element-align-right .elementor-divider__element{margin-right:0}.elementor-widget-divider:not(.elementor-widget-divider–view-line_text):not(.elementor-widget-divider–view-line_icon) .elementor-divider-separator{border-top:var(–divider-border-width) var(–divider-border-style) var(–divider-color)}.elementor-widget-divider–separator-type-pattern{–divider-border-style:none}.elementor-widget-divider–separator-type-pattern.elementor-widget-divider–view-line .elementor-divider-separator,.elementor-widget-divider–separator-type-pattern:not(.elementor-widget-divider–view-line) .elementor-divider-separator:after,.elementor-widget-divider–separator-type-pattern:not(.elementor-widget-divider–view-line) .elementor-divider-separator:before,.elementor-widget-divider–separator-type-pattern:not([class*=elementor-widget-divider–view]) .elementor-divider-separator{width:100%;min-height:var(–divider-pattern-height);-webkit-mask-size:var(–divider-pattern-size) 100%;mask-size:var(–divider-pattern-size) 100%;-webkit-mask-repeat:var(–divider-pattern-repeat);mask-repeat:var(–divider-pattern-repeat);background-color:var(–divider-color);-webkit-mask-image:var(–divider-pattern-url);mask-image:var(–divider-pattern-url)}.elementor-widget-divider–no-spacing{–divider-pattern-size:auto}.elementor-widget-divider–bg-round{–divider-pattern-repeat:round}.rtl .elementor-widget-divider .elementor-divider__text{direction:rtl}.e-con-inner>.elementor-widget-divider,.e-con>.elementor-widget-divider{width:var(–container-widget-width,100%);–flex-grow:var(–container-widget-flex-grow)}
System Division – Monitoring Loacation System
1102190034

Ahmad Ihsan Nur Fata
System Division – Autonomous System
1102194099

Ramadhan Jaka Dirgantara
Mechanic Division – Feed and Hull Ejection System
1102190154