/*! elementor – v3.6.7 – 03-07-2022 */
.elementor-heading-title{padding:0;margin:0;line-height:1}.elementor-widget-heading .elementor-heading-title[class*=elementor-size-]>a{color:inherit;font-size:inherit;line-height:inherit}.elementor-widget-heading .elementor-heading-title.elementor-size-small{font-size:15px}.elementor-widget-heading .elementor-heading-title.elementor-size-medium{font-size:19px}.elementor-widget-heading .elementor-heading-title.elementor-size-large{font-size:29px}.elementor-widget-heading .elementor-heading-title.elementor-size-xl{font-size:39px}.elementor-widget-heading .elementor-heading-title.elementor-size-xxl{font-size:59px}
Unmanned Surface Vehicle Fish Feeder
Deskripsi
Desain konsep solusi yang dirancang adalah membuat sistem pakan otomatis yang berada pada Unmanned Surface Vehicle Fish Feeder. USV Fish Feeder akan melaju pada titik yang sudah ditentukan lalu akan memberi perintah untuk mengeluarkan pakan sesuai dengan yang dibutuhkan ikan pada kolam tersebut. Desain tangki pakan akan berbentuk mengerucut ke bawah agar melancarkan proses pengeluaran pakan. Tangki pakan akan mengeluarkan pakan pada wadah kecil yang sudah terdapat sensor pengukur berat untuk kemudian dikeluarkan pada kolam ketika berat pakan sudah sesuai dengan kebutuhan kolam.
Unmanned Surface Vehicle (USV) atau Kapal Tanpa Awak dioperasikan pada permukaan air tanpa awak. USV dikendalikan dari jarak jauh menggunakan remote control atau dioperasikan autopilot dengan memberikan perintah-perintah seperti waypoint, melalui Ground Control Station (GCS). USV dioperasikan melalui sistem komunikasi nirkabel untuk mengolah data-data pergerakan dan pengamatan yang akan dikirimkan ke GCS secara real time. Pada beberapa kasus tertentu USV dengan ukuran kecil akan membantu pengoperasian seperti kegiatan intelijen pengawasan pantai, keamanan pelabuhan dan perbatasan, otonom pencarian, sinyal transmisi antara udara dan kendaraan bawah air, dan perlindungan kapal selam. Pada saat ini USV tidak hanya digunakan pada kegiatan tersebut melainkan dapat juga digunakan pada kegiatan budidaya ikan untuk mempermudah pemberian pakan pada kolam dengan skala besar.
Documentation
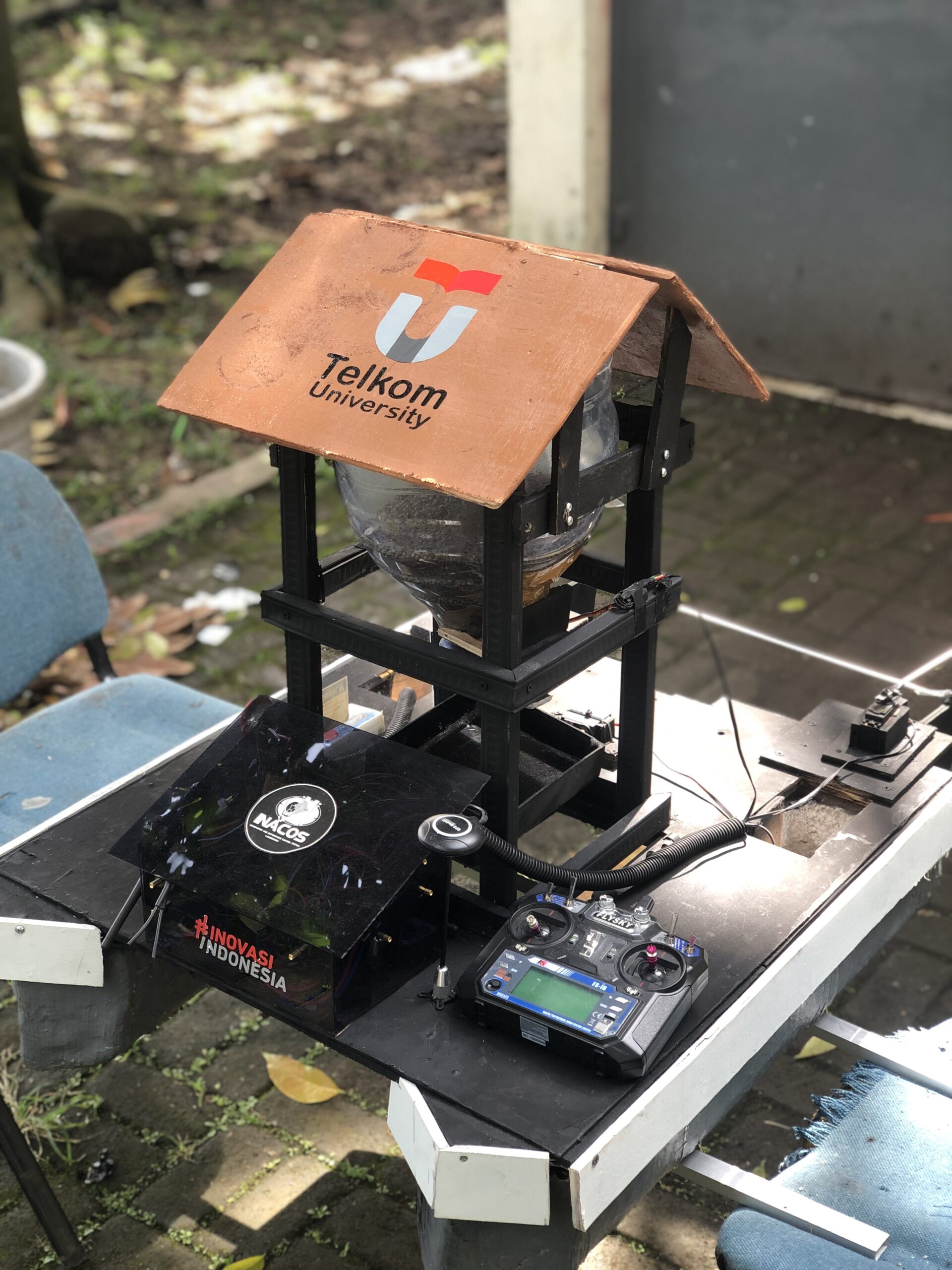
Desain Sistem
Sistem ini dirancang membuat sistem pakan ikan otomatis dengan objek penelitian ikan nila. Sistem pakan otomatis ini berada pada Unmannned Surface Vehicle (USV) yang dapat bergerak menuju titik tertentu sesuai dengan perintah. Sistem pakan otomatis ini akan menaburkan pakan ketika USV sudah mencapai titik yang ditentukan. Terdapat satu tangki pakan ikan untuk menampung pakan dengan volume lima kilogram dan ember kecil yang terdapat sensor Load cell untuk mengukur berat pakan ikan sebelum ditebar pada kolam agar pakan yang ditabur di setiap titiknya sesuai dengan kebutuhan ikan. Motor servo akan membuka tutup bawah tangki untuk menyalurkan pakan pada ember kecil hingga berat pakan sesuai dengan yang dibutuhkan. Pakan pada ember kecil akan ditaburkan secara langsung pada kolam dengan cara dibalikan menggunakan motor servo yang sudah terpasang pada ember tersebut.
Fungsi
/*! elementor – v3.6.7 – 03-07-2022 */
.elementor-widget-image-carousel .swiper-container{position:static}.elementor-widget-image-carousel .swiper-container .swiper-slide figure{line-height:inherit}.elementor-widget-image-carousel .swiper-slide{text-align:center}.elementor-image-carousel-wrapper:not(.swiper-container-initialized) .swiper-slide{max-width:calc(100% / var(–e-image-carousel-slides-to-show, 3))}






Previous
Next
- Arduino UNO akan menerima sinyal informasi dari Pixhawk PX4 untuk menjalankan perintah.
- Motor Servo A berfungsi membuka penutup tangki pakan untuk mendistribusikan pakan pada ember kecil.
- Sensor Load cell mengukur berat pakan pada ember agar pakan pada ember sesuai dengan berat yang diperintahkan oleh Arduino UNO, ketika berat pakan sudah sesuai maka Motor Servo Kembali menutup tangki.
- Motor servo B akan menggerakan ember kecil untuk menaburkan pakan ketika Sensor Load cell sudah sesuai nilainya dan sudah mendapat perintah dari Pixhawk PX4.
- Ketika pakan sudah ditabur Arduino UNO kembali menunggu sinyal perintah dari Pixhawk PX4.
Fitur
- Sistem ini dapat memberi pakan ikan manual dengan pengendali remote control dan dapat secara otomatis melalui program yang sudah diatur pada mikrokontroler.
- Sistem pemberi pakan otomatis ini dapat mengeluarkan pakan sesuai dengan takaran yang sudah ditentukan sesuai dengan kebutuhan kolam ikan.